
输电线路巡检机器人 CQSETDXJ2000
简介
输电线路巡检机器人能适应跨越大范围林区、积水域以及其他复杂地理环境和交叉跨越环境的线路巡检,实现监控状态下的自主巡检与视觉监视、线路廊道三维建模、跨越杆塔等,可以在野外环境下完成连续巡检作业,可减轻输电运维人员的劳动强度与难度,提高巡检效率与质量,对输电工程的安全可靠运行具有重要意义。 |  |
 |
功能特点
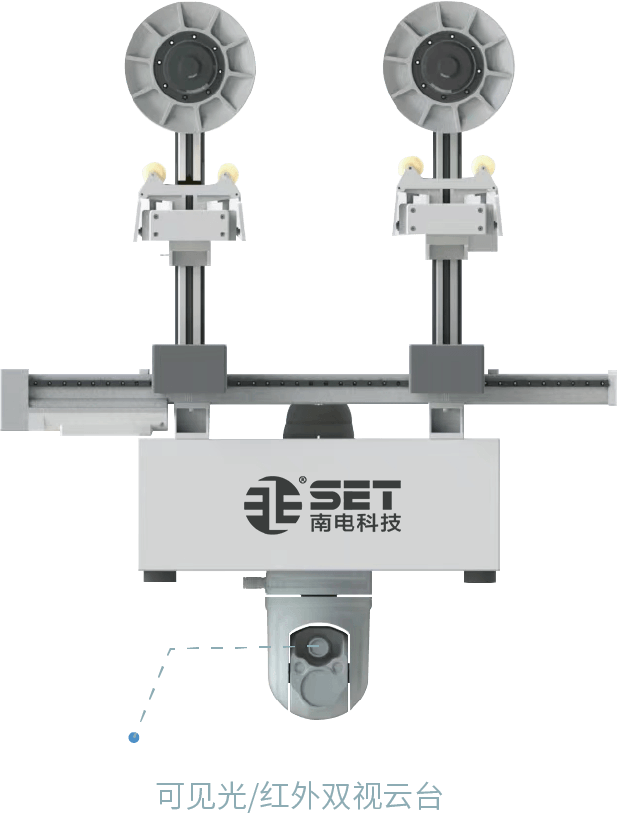
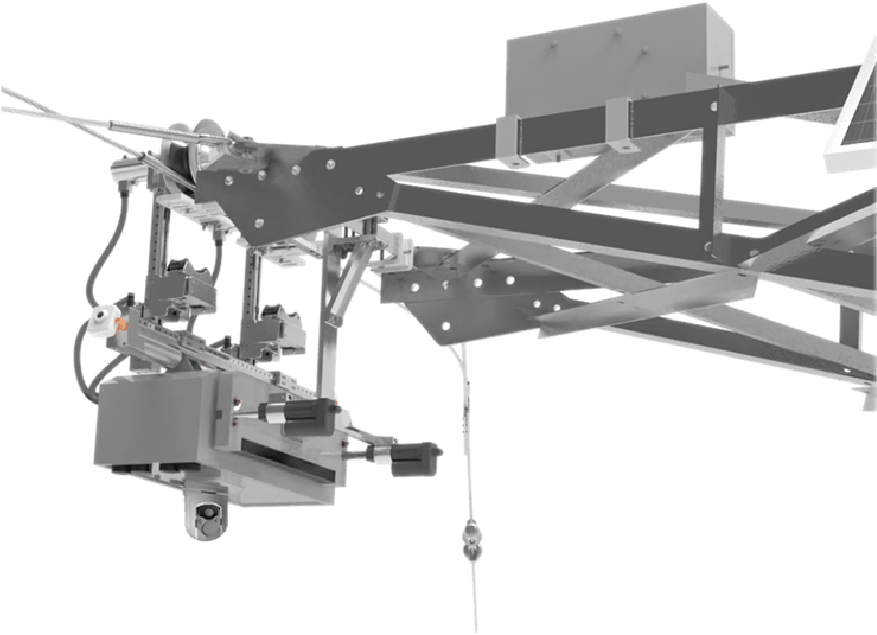
可见光、红外光和激光图像融合 1)33倍光学变倍高清可见光摄像头; 2)热成像摄像头:高灵敏度探测器; 3)激光树障测距; 4)激光雷达扫描三维成像点云图; 5)云台控制:水平360°、垂直-25°~+90°旋转。 | 自主巡检、自动越障 1)稳定性强,可在恶劣环境下正常进行巡检任务; 2)根据气象数据、障碍物和坡度自适应控制行走,单次持续巡检时间≥4h; 3)机器人整体重量≤35kg,最大行走速度≥3.6km/h,爬坡能力≥45°。 |
 |  |
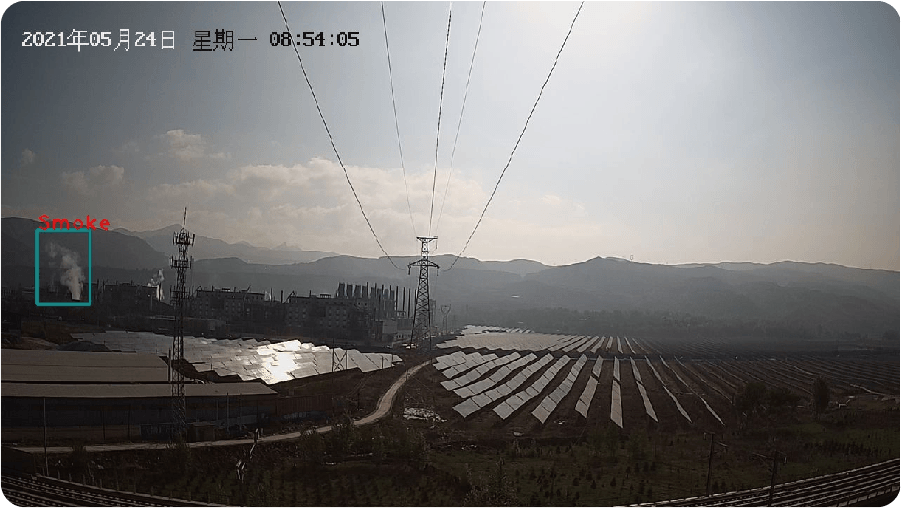
边缘计算核心 1)支持智能识别功能:识别异物悬挂、车辆和人员闯入、车辆超高智能检测; 2)全天候实时视频监控和录像,外破识别准度更高、信息回传速度更快,及时确定外力破坏点; 3)采用高端双核架构,集成神经网络处理器NPU与视频处理单元VPU,内置专业AI算法,提供“硬件+软件+算法”系统化解决方案。 | 地线巡检机器人控制软件 1)远程控制地线巡检机器人的运动和巡航进度; 2)可按设定的巡检任务自动巡检; 3)实时查看地线巡检机器人实时视频、监测数据; 4)任务制定、记录查询、告警信息查询; 5)输电线路及廊道环境数据查询、可视化图表展示; 6)定期生成输电线路巡视巡检报告,评估输电线路运行状态。 |
 自主充电 |  巡检缺陷识别 |
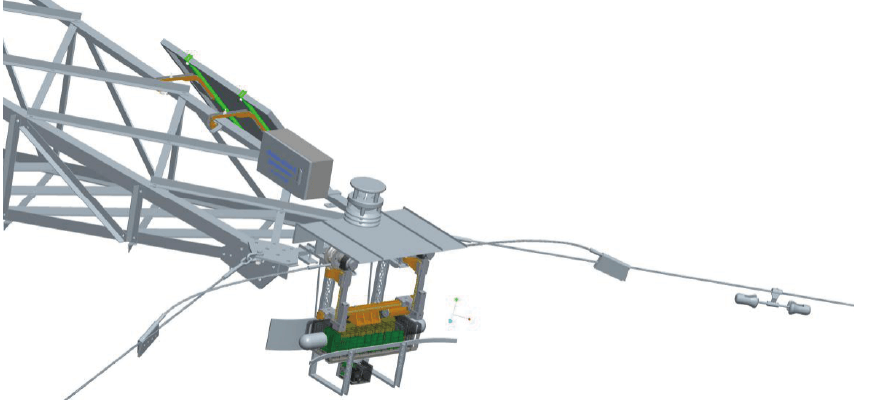 地线巡检机器人续航里程≥8km | 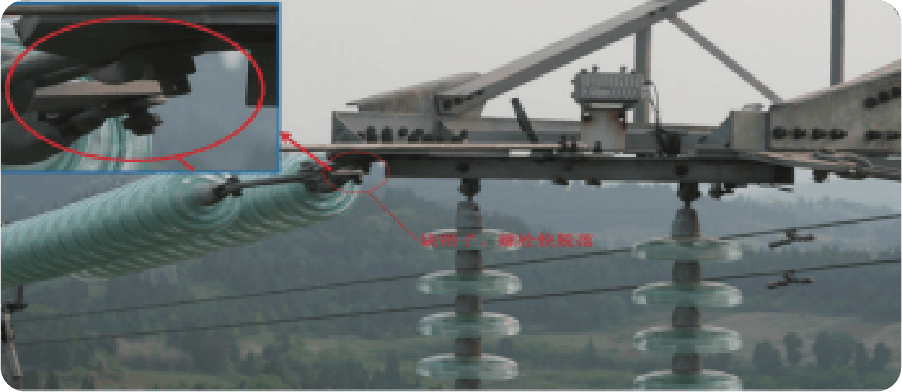 绝缘子小号侧内挂点缺销子、螺栓即将脱落 |
 应用现场 |  应用现场 |